Lately, the most frustrating error messages have been the “no communication” indication on our scanners. It seems that over the last couple of years, the number of communication faults has increased a hundred times over. This is especially true of Mercedes models. In researching information for this article, I’ve come to an understanding as to why this is happening and what we can look forward to in the future as these models age, but not always gracefully.
Think of the Controller Area Network (CAN) as a city freeway system. There is the main thoroughfare and ramps and side streets to reach various neighborhoods. Here in Seattle, there are also HOV (high-occupancy vechicle) lanes that allow some traffic flow, so there is always a way for emergency vehicles to get through because they have a higher priority, but again, even important vehicles need space to move. Congestion at any point can cause problems. Traffic backs up, then gridlock causes everything to stop, and that takes time to clear.
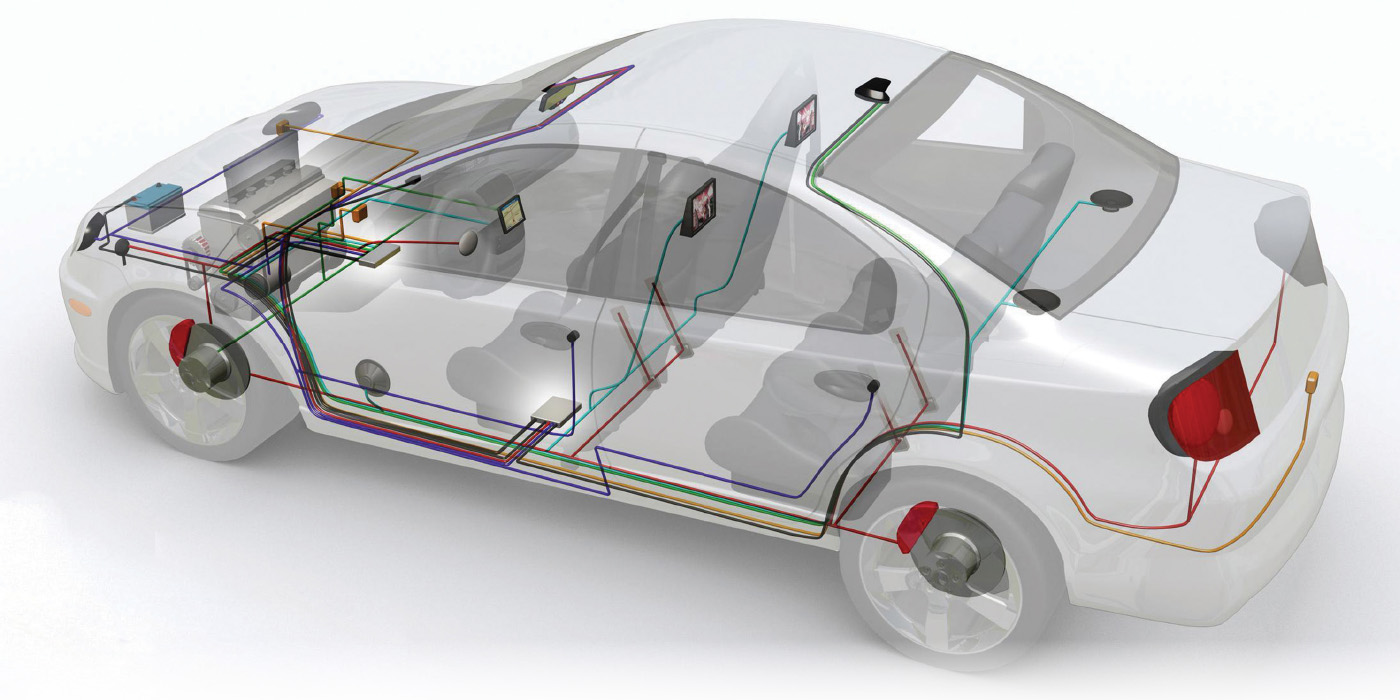
CAN bus systems are not new. Developed in the early 1980s by Bosch, they have been integrated on virtually all European manufacturers’ vehicles over the last 25 years, and on some Asian and domestic models since the mid 1990s. Controller area networks are used to interconnect the various sensors, control units, computers and control modules, and allow control of just about every mechanical or electronic component as it interacts with others in the vehicle. Initially only seen on some premium models, they are appearing on entry-level models in greater numbers every year.
On Mercedes cars, CAN wiring has been incorporated since 1992 to allow the sharing of information that is used for the engine, transmission, airbag, anti-lock brakes and suspension control systems. Mercedes uses a two-wire system, which allows two data streams. One handles communication for the primary modules for major components like the engine (PCM), transmission (ETC), ABS, ESP (electronic stability protection) and ASR (acceleration slip reduction), and other systems designed to protect the driver against making bad driving decisions. The other wire is used to connect accessory systems such as locks, windows, HVAC and even the audio system. That second wire also is supposed to provide a backup path if the main or primary control wire is damaged.
Since these systems were first integrated into wiring harnesses, the ability of the controllers and control units to handle more information at faster speeds has made reliability a problem. With each increase in data transfer protocol, or bandwidth, the integrity of the wiring has been the limiting factor for reliable and efficient operation.
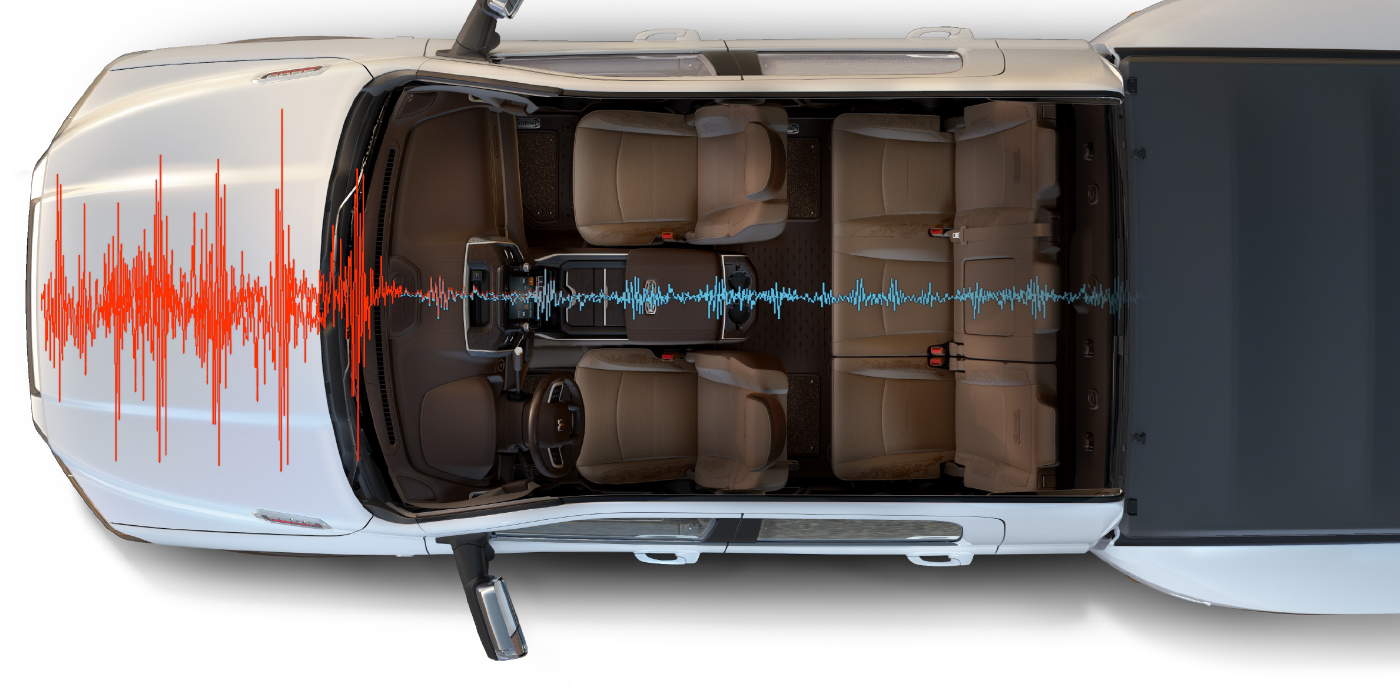
Since the system uses digital technology, even a small hiccup will cause miscommunication, false signals and fault codes. This is probably why we see code descriptions like “implausible.” The processors (See Photo 1) are taking in and distributing information that has been interrupted or misinterpreted by another module or controller. These CAN signals are also prioritized depending on whether the information is needed by the master control module (Mercedes calls this the HFM-SFI module). Wiring and connector condition becomes a problem at even lower mileages than has been typical of Mercedes cars.

In this article, I’ll cover some of the more common faults, what it takes to plan and achieve success in diagnosis, and the places to look for the cause of faults. This is all from the perspective of the independent technician learning to live with evolving automotive technology. The desire to learn, stay informed and become diligent in accessing information on the latest technology is what will make us profitable in the future. This is a constantly changing technology, taking us to the next step of totally wireless technology that is being used, tested and incorporated right now. The result is the need for new test equipment, education and procedures for diagnosis as these vehicles come out of dealer service and into the aftermarket.
 Do not expect to know everything about CAN bus systems after reading this. It would take a book to explain all of this information. But expect that, at some point, one of these cars will wind up in your shop, probably not drivable, and the customer is going to want some answers. Even if you don’t have the test equipment (See Photo 2) or knowledge to completely repair the vehicle, you may be able to revive it enough to get it to someone who does, and that may be all it takes to turn a bad situation into an acceptable one, and that helps all of us.
Do not expect to know everything about CAN bus systems after reading this. It would take a book to explain all of this information. But expect that, at some point, one of these cars will wind up in your shop, probably not drivable, and the customer is going to want some answers. Even if you don’t have the test equipment (See Photo 2) or knowledge to completely repair the vehicle, you may be able to revive it enough to get it to someone who does, and that may be all it takes to turn a bad situation into an acceptable one, and that helps all of us.
WHERE TO LOOK
One of the hardest parts of diagnosing these cars is finding information that tells you how a particular system is designed to work, and what it is supposed to do (See Photos 3 and 4). What should be listed in repair literature as “description and operation,” is not provided.
The owner’s manual is one place to find information on how a particular component is supposed to work, and a road test can confirm whether that system is operating as it should.
Sometimes, what seems like an inappropriate operation is actually the way it was designed to work. Case in point: wipers that seem to run slower or faster depending on the speed of the car. On most M-B models, the wipers will operate differently through inputs from the CAN bus, depending on the resistance of the glass and the speed of the vehicle, even without the driver making a switch position change. Even changes in volume on the stereo can occur without driver input!
If you are lucky enough to have a good working relationship with other shops in your area that work on similar cars, networking with them about specific or common problems can also make diagnosing problems easier. As the aftermarket works to find out this information, it forces the manufacturer to release information to keep their vehicles on the road. A helpful parts person at the local dealer (or not so local) can also be a great source of information on pattern faults, given certain symptoms. Online tech assistance can also be invaluable.
FIRST STEPS TO DIAGNOSIS
If a Mercedes comes in with a boatload of faults, most of which are somewhat connected, don’t be surprised when many faults disappear with just a small repair. Having a scanner available that is compatible with CAN systems will at least give you the code (s) that may be causing the problem. Beyond pulling codes, here are a few steps you should take before you call the tow truck to take the vehicle to another independent shop willing to take on this challenge. Usually the MIL will be on, and at least some driveability problems will be obvious.
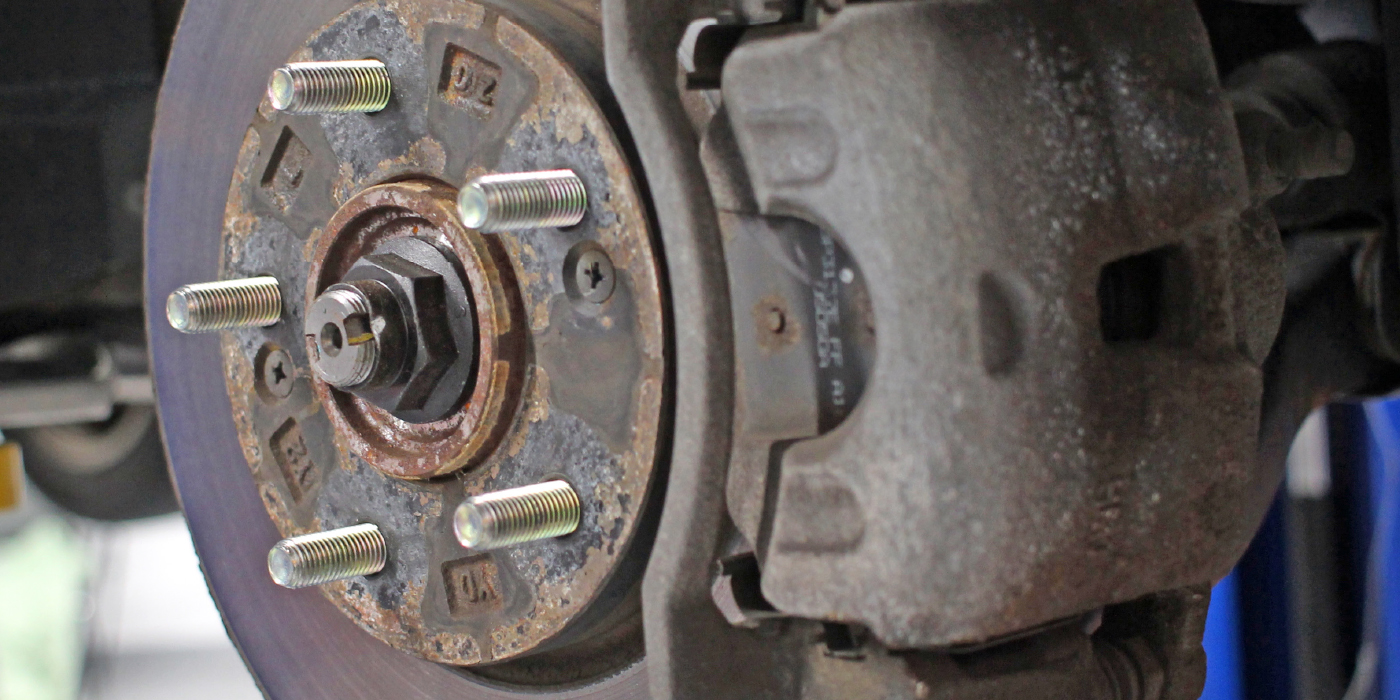
1. The very first steps are the same as any other diagnosis — the basics. Check fluid levels (See Photo 5), that the tires have sufficient air (if there are ABS-related codes, pressures should be checked and adjusted) and, if there are any accessories that are not operating, check the main fuses in the fuse box under the hood.

2. If the vehicle is not drivable, clearing the codes (after writing them all down) will possibly make a road test possible, but only until the main fault occurs again. Clearing the fault codes usually does not fully clear the faults from memory or turn off the MIL until a full drive cycle is completed, but clearing what can be cleared before the road test might make locating the actual cause of the faults easier.
3. If the vehicle still runs, a drive-cycle road test that involves every system on the car (like ABS and ASR) — and maybe a few quick jerks of the wheel to energize the electronic stability system — may be all that is needed to clear some faults that have collected while the MIL was on and communication from numerous faults clogged the CAN bus with unnecessary information. This road test should include slow speed turns, acceleration and deceleration and a few wide- open throttle blips, if possible.
4. Either before or after the initial road test, do a full inspection of the bottom of the car for damage, fluid leaks or bent components that might impact the systems indicated by the fault codes. Remember that with cars built with CAN bus systems, anything may be interconnected with the module that saw the fault, and might have intercepted a signal that may have caused the fault code to set.
Even a rough road can set enough faults to cause the ABS, ASR or ESP systems to get confused about what is really happening. Attempting to drive the car on ice, with the tires spinning may cause a total shutdown. A fault in a major link (like a wheel speed sensor wire) can cause a full shutdown that will not allow the car to accelerate. Some models do not have a way to disable these protection systems.
5. A look under the hood and under the engine covers (See Photo 6) might reveal a culprit in the form of a disconnected electrical connector, damaged or disconnected hoses, heat or rodent damage or a total lack of maintenance. Engine sludging, low coolant level, low brake fluid level or other serious faults can cause a major communication interruption.

6. When looking for driveability faults, pay close attention to breather hoses (pinch the breather hoses at several points to see if they have turned to mush), air intake leaks (especially where the intake tube connects to the throttle body) or anything that would cause false readings from the MAF (like a damaged harness or connector that’s loose).
It doesn’t take much of a leak or misfire to throw all other readings into an out-of-range situation that will cause multiple faults to set. Staying with OEM parts can help prevent problems. Using the wrong spark plugs or aftermarket filters can contribute to out-of-balance readings that will add up to a failure. Having an accurate vehicle service history might give some clues as to the cause of a fault.
COMMON PROBLEMS
I’m not going to go into great detail on certain fault codes here, simply because the diagnostic trees are all about the same. An example of CAN communication codes is something like C1141, C1142, etc., which are faults for periodic abnormality in the signal wave pattern from the wheel speed sensors. With Mercedes-specific software and scanner capability, other codes will lead you to a specific component, but the diagnostic tree will go something like this.
With the necessary equipment to read the data from the wheel sensors, the diagnostic tree leads you through road tests to check the speed signals, inspect for mechanical malfunctions (like broken wires and damaged sensor rotors) and sensor clearance measurements. Then, the diagnosis goes to component replacement until the fault is resolved. That might work for a dealer, but for an independent shop, that is out of the question. Going further on the diagnostic tree, it usually sends you back out on the road, with a recheck of the sensor readings and then a control module replacement.
This is why, in several cases that I’ve seen, clearing the codes and doing a road test after eliminating any obvious mechanical faults has turned off the MIL and cleared the fault memory.
The wild card, though, is the CAN bus itself. Since it takes only a momentary fault in one of many controllers to send the main computer into diagnosis mode, it may take more than a normal road test to induce the same failure, if that’s possible. Electrical connections, relays, multi-plugs and power distribution problems can cause the kind of traffic jams that will cause the whole system to shut down. Remember that since all of this information is transferred on one or two wires, in digital form, then decoded and acted upon in the main controller, it can take some time for the system to recover from even a small fault.
FINISHING UP
So what does an independent repair shop in a small town, miles from the nearest dealer do with one of these cars? My best advice is; make the basic inspections, and check and clear as many codes as possible. Disconnect the battery for a half hour or so to allow the system to completely shut down, and then, if possible, follow the above steps. There may still be an underlying problem that will cause another failure in the future, but it may also have just been a “pothole” in the highway that caused the whole system to shut down.